
👧🏻 About Me
I am currently a 3rd-Year Master student at Tsinghua University, under the guidance of Prof. Haoqian Wang. I got B.Eng. degree in Software Engineering at Northwestern Polytechnical University. I am looking for a PhD position in Fall, 2025.
Currently, I’m interested in 3D computer vision, with a particular focus on 3D Scene Reconstruction and Perception, Autonomous driving, including 3D gaussian splatting and depth estimation.
More about me through CV-en.
I am looking for a Ph.D. position (25 Fall) in 3D vision, feel free to contact me at yingsh.zou@gmail.com.
📝 Publications
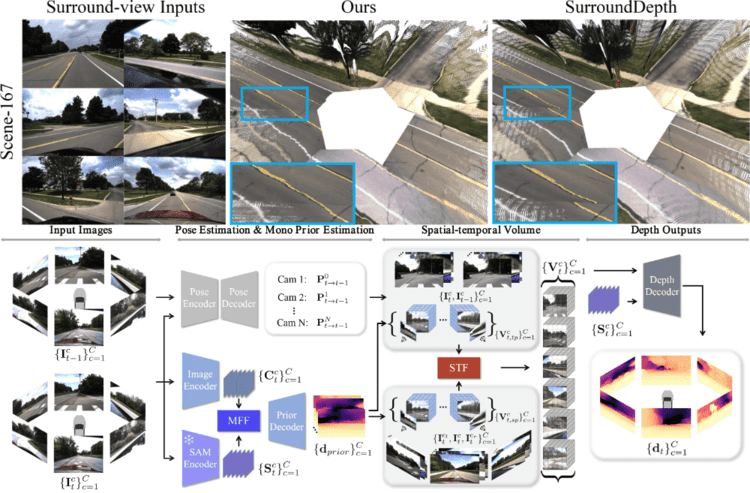
M^2Depth: Self-supervised Two-Frame Multi-camera Metric Depth Estimation
Yingshuang Zou* , Yikang Ding*, Xi Qiu, Haoqian Wang†, Haotian Zhang†
Website / Paper / Code
- We integrate spatial-temporal information for the metric depth estimation; we introduce strong SAM prior to enhance the quality of depth detail.
TranSplat: Generalizable 3D Gaussian Splatting from Sparse Multi-View Images with Transformers
Chuanrui Zhang*, Yingshuang Zou*, Zhuoling Li, Minmin Yi, Haoqian Wang†
Website / Paper / Code
- We present TranSplat, a transformer-based approach for generalizable 3D gaussian splatting from sparse multi-view images.
📄 Preprint Papers
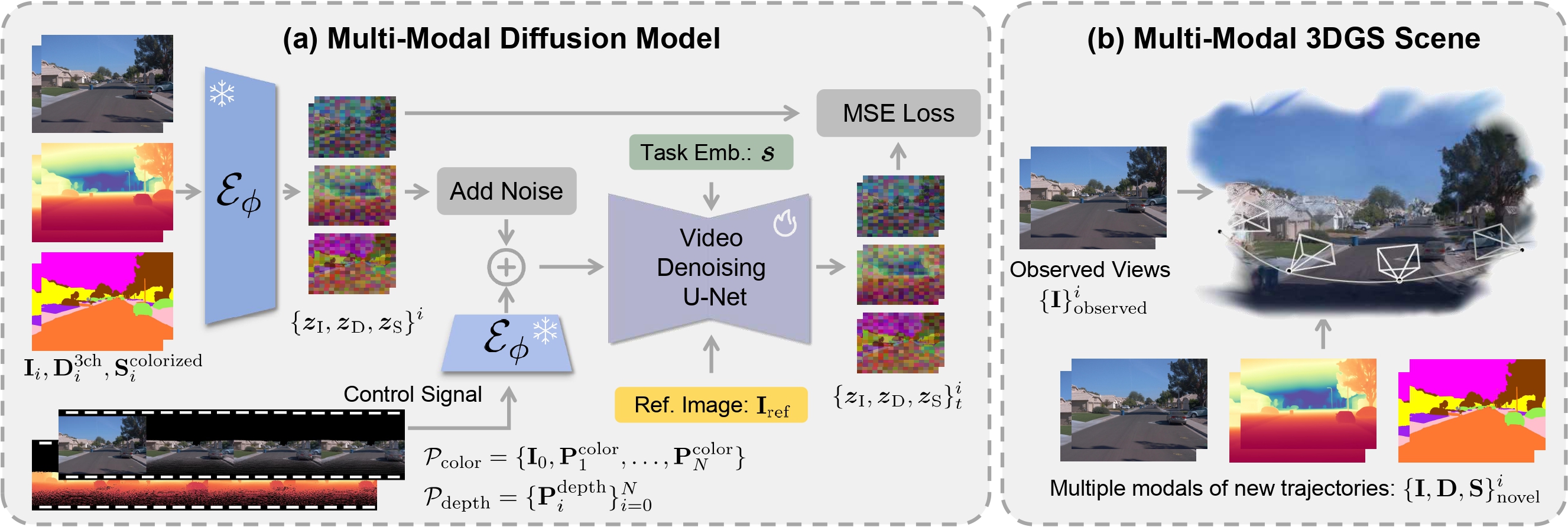
MuDG: Taming Multi-modal Diffusion with Gaussian Splatting for Urban Scene Reconstruction
Yingshuang Zou*, Yikang Ding*, Chuantui Zhang, Xiaoyang Lyu, Feiyang Tan, Xiaojuan Qi, Haoqian Wang†
Website / Paper / Code
- We present MuDG, a controllable Multi-modal Diffusion model with Gaussian Splatting (GS) for Urban Scene Reconstruction.
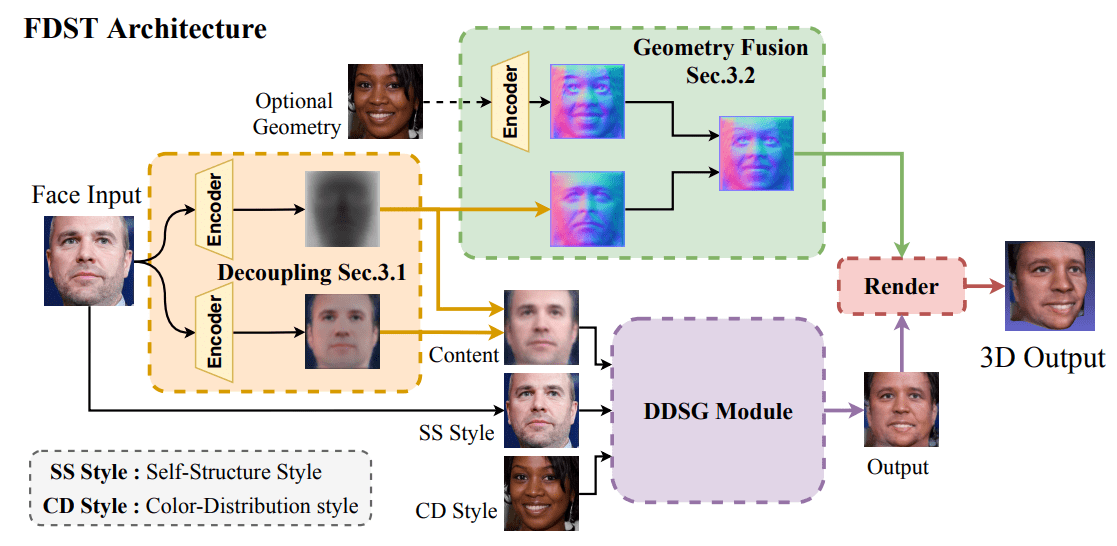
3D Face Arbitrary Style Transfer
Xiangwen Deng, Yingshuang Zou, Yuanhao Cai, Chendong Zhao, Yang Liu, Zhifang Liu, Yuxiao Liu, Jiawei Zhou, Haoqian Wang†
Paper
- We propose a novel framework FDST, for 3D face arbitrary style transfer, capable of high-fidelity face texture reconstruction, region-controllable style transfer, large-pose face reconstruction, and artistic face reconstruction.
Projects
Gaussian Splatting for Dynamic Driving Scenes
- We design a novel scene representation for modeling complex dynamic street scene, which efficiently reconstructs and renders high-fidelity “dynamic urban scenes” in real-time.
Competitions

ICRA 2020 DJI Robomaster AI Challenge
Third Prize / Ranking: 6th in 72 teams, 2020.
Emulator / Perception / Strategy / Planning
- As team leader, I managed the project, steering our team to a 6th-place finish out of 72 competitors. My key duties encompassed developing a Gazebo-based simulation platform and designing perception algorithms and planning module for robots.

FIRA Roboworld Cup, Robosot Race Competition
First Prize / Ranking: 2nd, 2019.
Code
- We designed a wheeled robot with lidar, capable of detecting balls on the ground and placing them in specified locations. As the team leader, I was primarily responsible for the navigation algorithms and the control algorithms of the robot.
💻 Experience
- 06/2023~07/2024, I was a full-time intern at the Megvii Research.
🏆 Honors and Awards
- Scholarship, Tsinghua University, 2023.
- Outstanding Graduates, Northwest Polytechnic University, 2022.
- National Scholarship, 2021.
- First Class Scholarship, Northwest Polytechnic University, 2019, 2020, 2021.